2025年4月1日,福建省新能源汽车电机产业技术开发基地邀请厦门理工学院刘显贵教授、博士做了题为《复杂路况下自动驾驶汽车横向多目标协同可拓控制研究》的学术报告。基地所挂靠单位全讯白菜网002师生、基地全体研究人员共100余人参加了报告会。
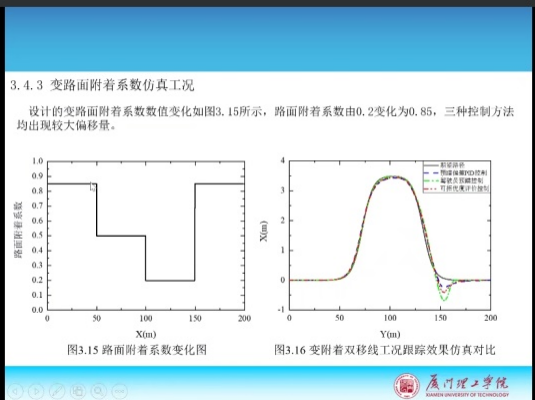
刘教授在报告中,详细介绍了国内外自动驾驶汽车控制的研究现状、关键技术及未来发展方向。刘教授的报告在自动驾驶汽车的横向多目标协同可拓控制研究领域中,重点阐述了采用PID控制和可拓控制的建模、多目标协同策略及算法,并就两者的控制偏差与人工驾驶状态进行了仿真与道路行驶的比较,结果表明,可拓控制的偏差较小,在不同路面附着系数的工况下,均能保持车辆行驶的稳定性与舒适性,可达到自动驾驶的预期效果。未来,随着AI模型的不断训练、进化,控制偏差将会越来越小,甚至优于人工驾驶状态。
报告结束后,刘教授还与师生进行了互动交流,回答了教师、学生的相关问题。通过本次学术报告,将对福建省新能源汽车电机产业技术开发基地未来的科研产出起到积极的推动作用。